搭建阿克曼底盘小车在 navigation2 中仿真
”gazebo urdf 阿克曼底盘模型“ 的搜索结果
里程计模型(2):阿克曼结构底盘
标签: 自动驾驶

电机采用有刷直流电机,驱动电机采用霍尔编码器,转向电机采用霍尔编码器和绝对编码器串级控制(其中绝对编码器使用485通信)(位置环+速度环),遥控采用航模遥控器,使用CAN通信与上位机通讯。
FR-09阿克曼底盘用户使用手册

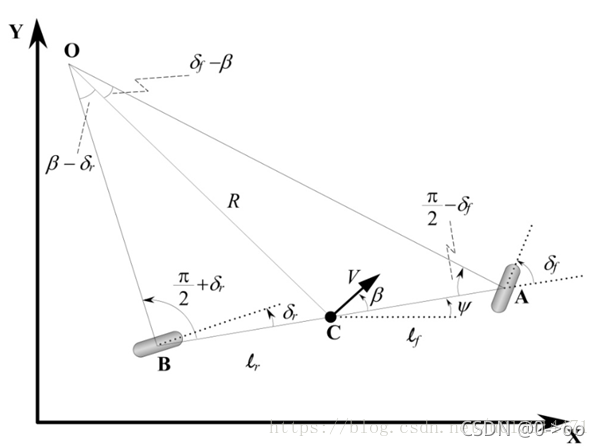
阿克曼底盘重心在后轮中心时原理与解算
标签: 算法

1.基于市面上典型阿克曼小车设计SolidWorks三维模型; 2.小车拥有基本外形还有电池、控制器、深度摄像头等细节; 3.小车的URDF模型已经搭建好,可修改导出。
差速轮模型,阿克曼模型的运动模型,轨迹预测计算,附带 C++ ROS 代码
后轴中点的速度的方向始终与车身横摆一致,这是由于后轮方向总是与车身方向一致。因此速度方向的方向向量为。,进一步可得后轴中点的速度为后轴中点的速度向量在该方向上的投影。对上式求导并结合法向量约束可知横摆...
阿克曼线控底盘的dbc协议文件
最近构建了ros2(humble)+nav2+差速/阿克曼底盘的gazebo仿真,使用docker+ade的方式。快速部署,马上学习,敬请期待,目前在进行发布前的整理工作,先上图。
1.包含阿克曼运动控制关键任务 2.采用阿克曼小车结构 3.设计对应的自定义串口通讯,进行实时反馈小车状态信息 4.可以通过PS2手柄和USB串口实现对应运动控制 5.包含自己搭建的URDF模型和SolidWorks三维模型
阿克曼循迹小车之S弯处理
自动驾驶基于阿克曼模型的控制算法仿真测试 , 本基于ROS扣取单独的阿克曼控制算法模块进行测试,能够帮助朋友们学习基于阿克曼模型的控制算法实现以及对该控制算法的理解。 本的阿克曼实现部分带有代码注释,帮助您...
机械工程师网址:www.jxgcs.com 电邮:[email protected] 年第 9 期运用MATLAB分析基于阿克曼转向梯形的转向模型卞





ROS小车阿克曼底盘是一种常见的机器人底盘结构,其结构主要由以下几个部分组成: 1.前轮:阿克曼底盘采用前轮转向的方式,通过控制前轮的方向来实现车体的转向。 2.后轮:后轮为驱动轮,通过电机驱动实现车体的...
FR-09 Pro 是一款全能型机器人线控移动平台,它采用阿克曼结构,驱动后置,相对于差动 结构的底盘,在普通路面上 FR-09 Pro 具有更快速的行走能力和较强的负载能力,同时对 轮胎的磨损也更小,搭配整体桥式悬挂,...

的参数优化需要考虑到阿克曼转向机构的限制,例如最小转弯半径和前轮转向角度限制。以下是一些针对阿克曼底盘机器人的。对于阿克曼(Ackermann)底盘的机器人,
阿克曼底盘小车F103是一种具有良好操控性能的底盘结构,下面是一些控制该底盘的基本步骤: 1. 确保你有一个适当的控制系统,比如遥控器或者单片机。 2. 将控制系统与底盘的电路连接起来。通常,你需要将电机与电机...



阿克曼转向原理 模型的分类解算 仅前轮转向,后轮角度不变 这种模式适用于多数车辆,只有前面轮子可以转向 前后轮均可转向 这种模式可实现全向运动,常用的运动模式如下: (1)前后轮角度相反 (2)前后轮...
推荐文章
- MacOS 系统成功安装 tensorflow 步骤_mac装tensorflow-程序员宅基地
- ES(Elasticsearch)7.6.1安装教程_安装elasticsearch-程序员宅基地
- spring boot>>RabbitMQ中间件发送验证码_basevo依赖-程序员宅基地
- uiautomatorviewer拉取手机竖屏却显示为横屏的问题_uiautomatorviewer方向倒了-程序员宅基地
- 加密技术简介-程序员宅基地
- 使用迭代器Iterator遍历Collection_.keyset().iterator().next()-程序员宅基地
- 日常Java练习题(每天进步一点点系列)_callable的call方法返回值-程序员宅基地
- 已解决Using TensorFlow backend.-程序员宅基地
- ring0下的 fs:[124]_nsfs124-程序员宅基地
- 高德地图打包后不能使用,高德导航View不显示,高德地图导航组件黑屏的问题;_amap.amapwx打包成安卓后无法使用-程序员宅基地